In Lab 10, I used a Python simulation to localize a virtual robot in a 2D environment similar to the arena set up in our lab space.
Localization and Bayes Filtering
Robots like our cars have no absolute or "true" knowledge of their position, so we must use information about the robot's environment to infer a position. This process is known as localization, and works best when built on probability.
To achieve probabilistic localization, we use a Bayes filter, which operates on a "belief". From its sensors and control inputs, and based on an initial state, a robot will have some idea of where it is; this is the belief. As the robot gets new sensor readings and control inputs, it can update that belief according to Bayesian inference.
Our robot's state represents its position on the ground plane in
- –5.5 ft
- –4.5 ft
The continuous 3D space the robot can occupy is discretized into a grid such that each cell represents 1x1 ft of planar space and 20 degrees of orientation. The grid is thus a 12x9x18 volume of cells.
Algorithm
The Bayes filter is an iterative process that first predicts the robot's next position based on control inputs, then updates that position using sensor observations. The prediction step increases uncertainty in the belief, while the update step decreases uncertainty. This algorithm is outlined in the following screenshot from Lecture 17.
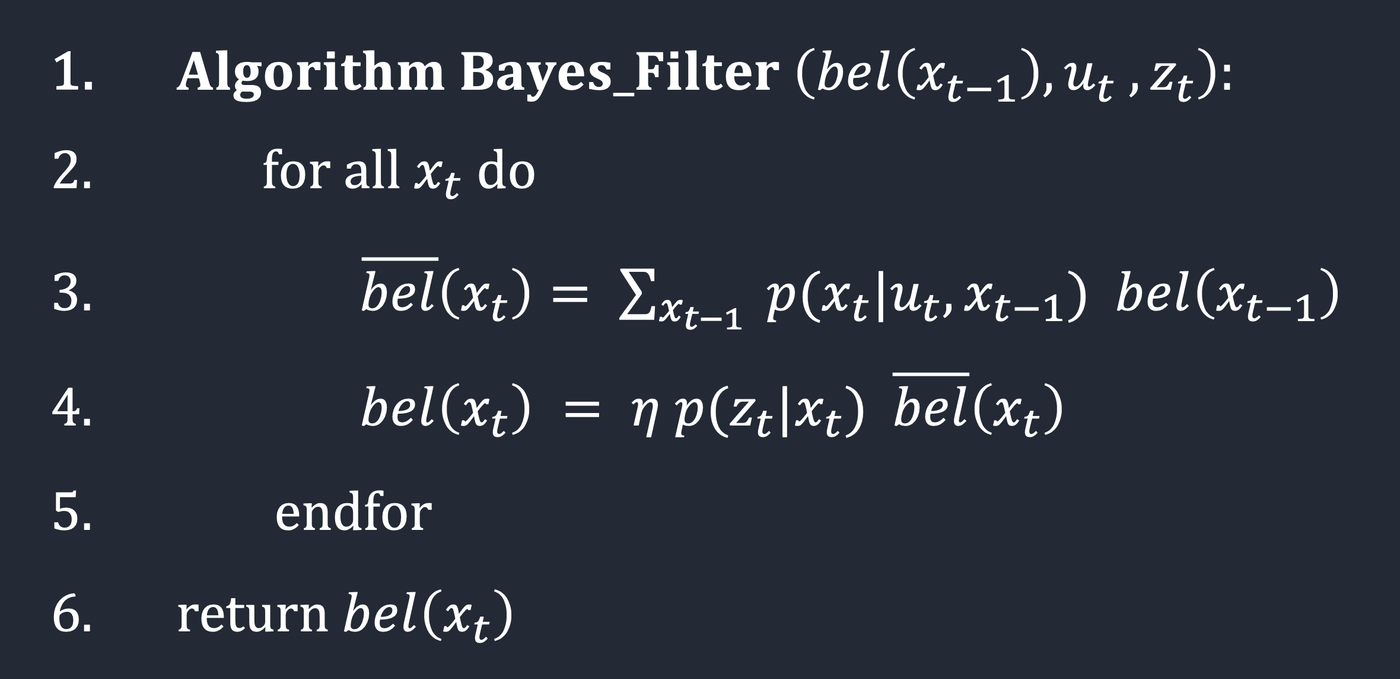
Here,
The algorithm loops over all possible poses
Sensor and Motion Models
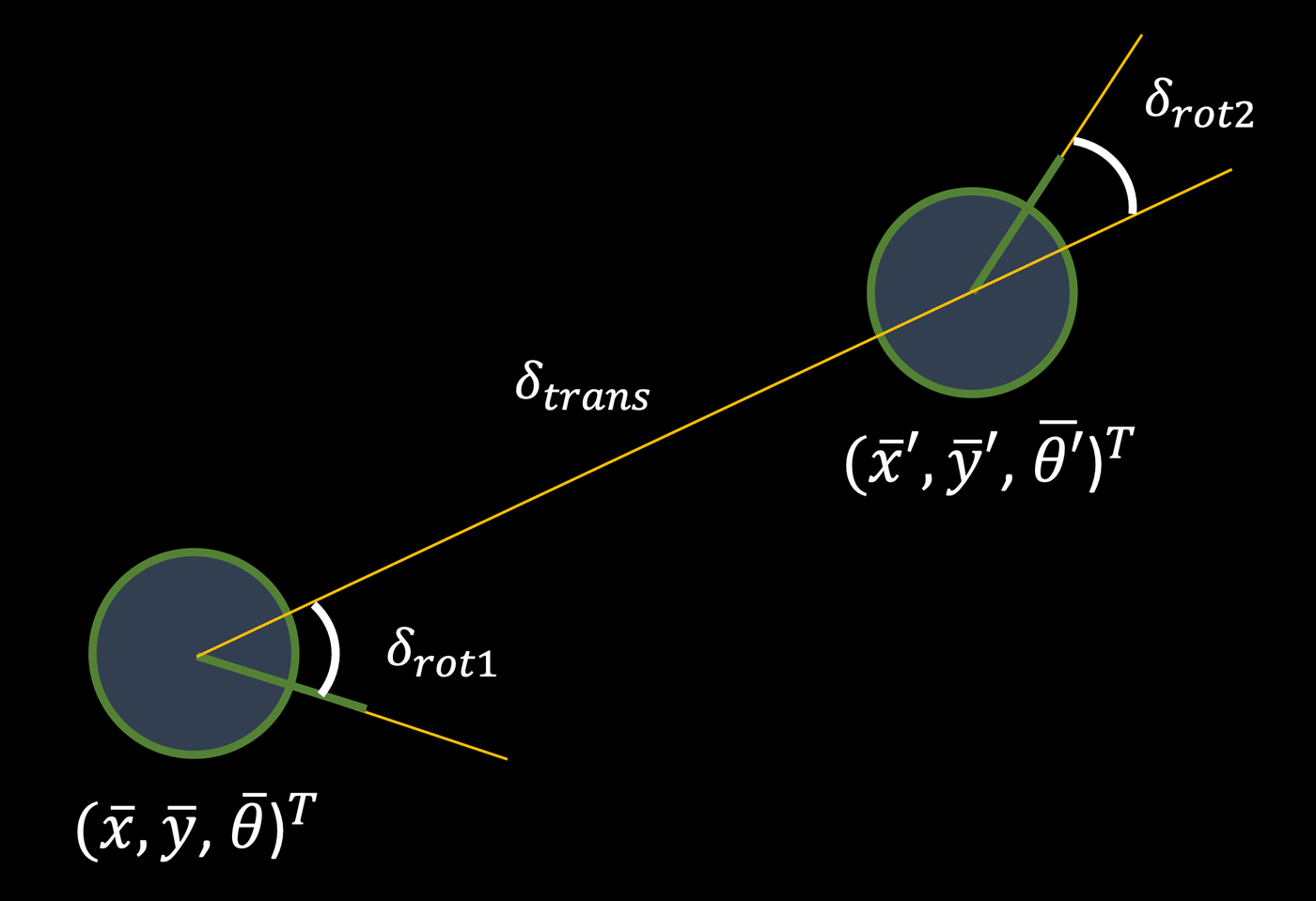
The robot's sensors are modeled to have a Gaussian distribution of noise. The control inputs follow an odometry motion model. The odometry model describes the difference between two positions or "poses" as an initial rotation, a translation, and a final rotation. This model is visualized in the diagram below.
Tasks
Using the provided Python simulation and Lab 10 notebook, I wrote the following functions to implement the Bayes filter.
Compute Control
The compute_control() function takes in a current pose and a previous pose and, using their difference, determines the initial rotation, translation, and final rotation that make up the steps of the odometry model, such that
In Python, arctan2, whose output is converted from radians to degrees using degrees(), and hypot(), which requires less syntax than a manual square root expression. Both angles are additionally normalized to [–180, 180].
def compute_control(cur_pose, prev_pose):
""" Given the current and previous odometry poses, this function extracts
the control information based on the odometry motion model.
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
Returns:
[delta_rot_1]: Rotation 1 (degrees)
[delta_trans]: Translation (meters)
[delta_rot_2]: Rotation 2 (degrees)
"""
# Get position and rotation components from current and previous poses
cur_x, cur_y, cur_theta = cur_pose
prev_x, prev_y, prev_theta = prev_pose
# Calculate the first rotation, then normalize to (-180, 180)
delta_rot_1 = mapper.normalize_angle(
np.degrees(np.arctan2(cur_y - prev_y, cur_x - prev_x)) - prev_theta,
)
# Calculate the translation as a hypotenuse
delta_trans = np.hypot(cur_y - prev_y, cur_x - prev_x)
# Calculate the second rotation, then normalize to (-180, 180)
delta_rot_2 = mapper.normalize_angle(cur_theta - prev_theta - delta_rot_1)
return delta_rot_1, delta_trans, delta_rot_2Odometry Motion Model
The odom_motion_model() function takes in a current pose and a previous pose, extracts the odometry model parameters from them using compute_control(), and then calculates the probabilities of those parameters as Gaussian distributions with relevant provided standard deviation u.
def odom_motion_model(cur_pose, prev_pose, u):
""" Odometry Motion Model
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
(rot1, trans, rot2) (float, float, float):
A tuple with control data in the format (rot1, trans, rot2)
with units (degrees, meters, degrees)
Returns:
prob [float]: Probability p(x'|x, u)
"""
# Get control parameters from the current and previous poses
delta_rot_1, delta_trans, delta_rot_2 = compute_control(cur_pose, prev_pose)
# Determine the probabilities of the control parameters
prob_rot_1 = loc.gaussian(delta_rot_1, u[0], loc.odom_rot_sigma)
prob_trans = loc.gaussian(delta_trans, u[1], loc.odom_trans_sigma)
prob_rot_2 = loc.gaussian(delta_rot_2, u[2], loc.odom_rot_sigma)
return prob_rot_1 * prob_trans * prob_rot_2Prediction Step
The prediction_step() function takes in a current and previous odometry state, extracts the odometry model parameters, and then iterates over the entire grid of discretized cells for both the previous and current pose to construct a predicted belief odom_motion_model(). The probabilities are multiplied together for each cell, tallied for the entire grid, and finally normalized as a distribution to sum to 1.
Because of the large number of iterations required to cover the 3D simulation volume, we can speed up the process a bit by ignoring very small probabilities less than 0.0001, which don't contribute significantly to the belief. This lowers the accuracy of the filter but decreases computational cost.
def prediction_step(cur_odom, prev_odom):
""" Prediction step of the Bayes Filter.
Update the probabilities in loc.bel_bar based on loc.bel from the previous time step and the odometry motion model.
Args:
cur_odom ([Pose]): Current Pose
prev_odom ([Pose]): Previous Pose
"""
# Get control parameters from odometry
u = compute_control(cur_odom, prev_odom)
# Initialize bel bar
loc.bel_bar = np.zeros((mapper.MAX_CELLS_X, mapper.MAX_CELLS_Y, mapper.MAX_CELLS_A))
# Loop over the entire grid
for prev_x in range(mapper.MAX_CELLS_X):
for prev_y in range(mapper.MAX_CELLS_Y):
for prev_theta in range(mapper.MAX_CELLS_A):
# Skip states with very low probabilities to speed up the prediction
if (loc.bel[prev_x, prev_y, prev_theta] < 0.0001): continue
for cur_x in range(mapper.MAX_CELLS_X):
for cur_y in range(mapper.MAX_CELLS_Y):
for cur_theta in range(mapper.MAX_CELLS_A):
# Calculate the transition probability
p = odom_motion_model(
mapper.from_map(cur_x, cur_y, cur_theta),
mapper.from_map(prev_x, prev_y, prev_theta),
u
)
# Keep running sum of bel_bar
loc.bel_bar[cur_x, cur_y, cur_theta] += p * loc.bel[prev_x, prev_y, prev_theta]
# Normalize bel bar
loc.bel_bar /= np.sum(loc.bel_bar)Sensor Model
The sensor_model() function takes in an array of observations and calculates the probabilities of each of these occurring for the current state as a Gaussian distribution and a provided standard deviation
def sensor_model(obs):
""" This is the equivalent of p(z|x).
Args:
obs ([ndarray]): A 1D array consisting of the true observations for a specific robot pose in the map
Returns:
[ndarray]: Returns a 1D array of size 18 (=loc.OBS_PER_CELL) with the likelihoods of each individual sensor measurement
"""
# Calculate the probabilities of the given observations
return [loc.gaussian(obs[i], loc.obs_range_data[i], loc.sensor_sigma)
for i in range(mapper.OBS_PER_CELL)]Update Step
Lastly, the update_step() function iterates over the grid for the current state, retrieves the sensor model data using sensor_model(), and then updates the belief
def update_step():
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
"""
# Loop over the grid
for cur_x in range(mapper.MAX_CELLS_X):
for cur_y in range(mapper.MAX_CELLS_Y):
for cur_theta in range(mapper.MAX_CELLS_A):
# Get the sensor model and update the belief
p = sensor_model(mapper.get_views(cur_x, cur_y, cur_theta))
loc.bel[cur_x, cur_y, cur_theta] = np.prod(p) * loc.bel_bar[cur_x, cur_y, cur_theta]
# Normalize bel
loc.bel /= np.sum(loc.bel)Simulation
The first video below shows a trajectory and localization simulation without a Bayes filter. Here, the deterministic odometry model is plotted in red while the ground truth tracked by the simulator is plotted in green. As the simulation runs, it quickly becomes clear that the odometry model on its own is, quite simply, terrible, happily wandering outside of the bounds of the map and making just about no sense at all.
The next video shows the result of adding a Bayes filter to the localization simulation. While the direct odometry model is still less than useless, the probabilistic belief, plotted in blue, gives a very close—and importantly, very applicable—approximation for the robot's true position. The probabilistic approach is especially strong near walls, where the sensor data is more consistent and therefore more trustworthy, and less strong in more open spaces, such as the center of the map.
Conclusion
This lab has demonstrated the importance of using probabilistic models in controls and estimation. When considering how our ToF distance sensors alone can yield quite a range of values as influenced by noise, ambient lighting, surface properties, and so on, it certainly doesn't seem like a good idea to trust these readings directly all of the time. It does indeed make far more sense to assign a probability to everything and use those "weights" to make more reasonable—or perhaps, skeptical—inferences and decisions about an environment filled with uncertainty for a robot with only a couple of low-resolution sensors.